May 29, 2009
SIM Long Term Behavior
1. Introduction and Summary
This document discusses the status of the Chandra Focal Plane Systems (Figure 1), consisting of: The Science Instrument Module (SIM), the Top Hat, Turtle Shell, and the Ball Thermal Unit (BTU). Various limits have been designated on portions of the SIM, mainly temperatures: yellow and red upper and lower limits. We compare the on-orbit experience with the limits and project forward in time to predict behavior vs. limits in the future. We also consider possible failure modes for mechanical motion. (Electrical failure experience and possibilities?).
We have filtered the thermal data to include only “equilibrium” temperatures, those reached after the spacecraft has been pointing stably for 10 ks. Our conclusion is that presently most of the SIM thermal monitors show no problems and no prospects of exceeding even the yellow limits. There are a couple of borderline items: the SEA box temperature has been rising and occasionally violates its high yellow limit, but has not approached its high red limit and overall its temperature has stabilized. The SEA power supply is behaving in a similar manner, but its upper red limit is quite close to its upper yellow limit, so a few data points are close to the upper red limit. However, the overall trend of the SEA power supply appears to be that of stable or falling temperature. The general conclusion is that thermally, the SIM is in good shape. Of course this has been accomplished through deliberate efforts, limiting Chandra’s sun angle pointing to stay away from orientations that cause the SIM to get too hot, and we expect those efforts to continue.
The translation table is the most exercised mechanically moving part of the SIM. The motion telemetry we monitor is the PWM level for the most recent move. It shows no increase, indicating no increase in mechanical resistance to its motion. We also look at the motor temperature rise during stage translations to see if it shows signs of motor deterioration or mechanism resistance (Has this been done? We don’t show it here). The
2. The SIM Status
The X-rays enter along the telescope optical axis, in the –X direction. The view in Figure 1 is from the rear. The translation table moves along the Z axis to permit placing either the ACIS or HRC focal plane cameras on the optical axis for observations. The translation table has a variety of components that could interfere with operation if they malfunction during a move from one focal plane instrument to another. The focus system enables translation in the X direction by small amounts to adjust focus. It has a corresponding set of components, but is perhaps less critical, since if it jams, it most likely will jam in a position of good focus.
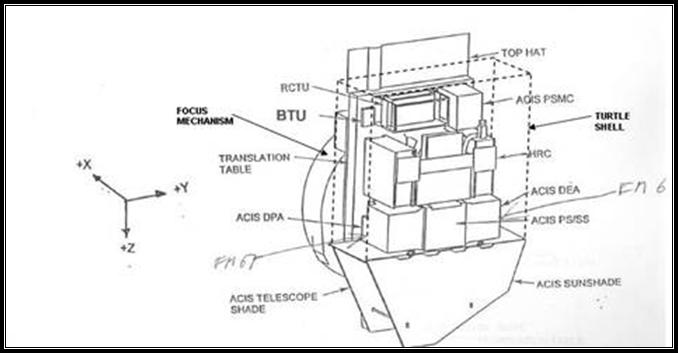
The Science Instrument Module, also called ISIM, Integrated Science Instrument Module contains the Translation Table, Focus Mechanism, ACIS, and HRC (see Table 1). The fundamental reference document is the ISIM Operations Guide. The SIM has two mechanical drives: the translation table and the focus mechanism. Another view of the ISIM is shown in Figure 2 and a photo of the Focal Plane Systems mounted on the telescope in Figure 3.
Table 1. Subassemblies of the ISIM
|
ACIS detector |
|
ACIS PSMC |
|
HRC |
|
ACIS DPA |
|
ACIS DEA |
|
ACIS PS/SS |
|
ACIS Telescope Shade |
|
ACIS Sunshade |
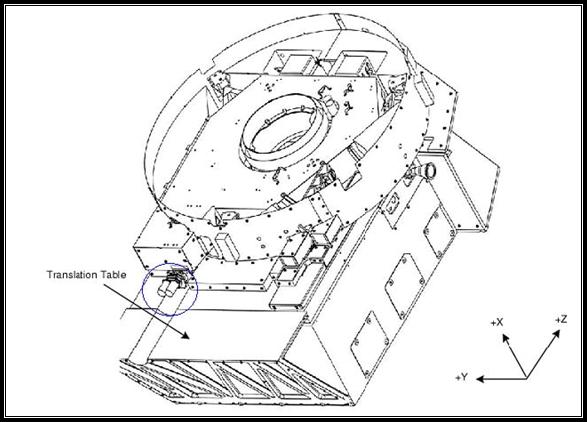
Figure 2. ISIM Drawing. X-rays enter in the –X direction.

Figure 3. Photo of ISIM mounted on optical bench
2.1. Translation Table
The translation table (Figure 2) is the base on which various detector assemblies that need to be moved in and out of the observing position are mounted. It is driven by the translation motor. Figure 4 shows a photo of an engineering model of the table that is located at the Chandra Operations Control Center.
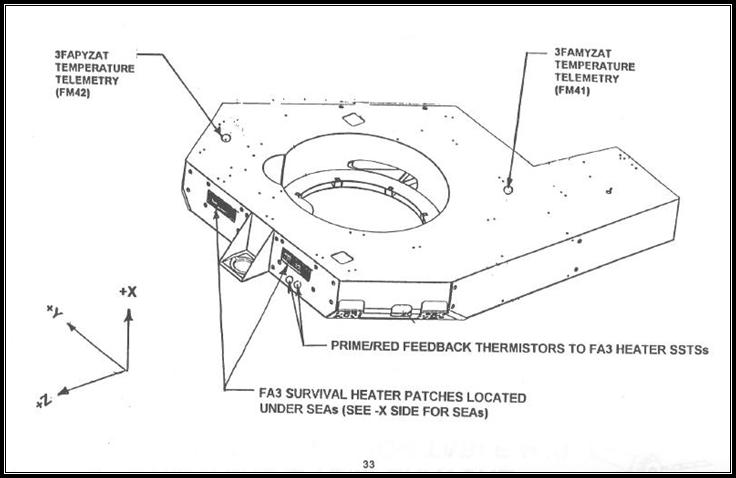
Figure 4. Translation Table
Critical components that could interfere with operation are:
- motor
- redundant motor
- gearbox with lubricant
- ball bearing lead screw with lubricant
- ways with lubricant.
A summary of early performance, Flight note 346 (Page 5 also gives a list of tests we should do(?)).
2.1.1. Translation drive
The translation drive is shown in Figure 5 and Figure 6. What we know about the motor -- the motor bearing is the part that gets the most wear in the whole system. It runs at 2000 rpm. There is also a brake, normally engaged, energized for release by a solenoid. The outer motor casing has gotten as hot as 50° C. We don't know what that implies for the bearing temperature.
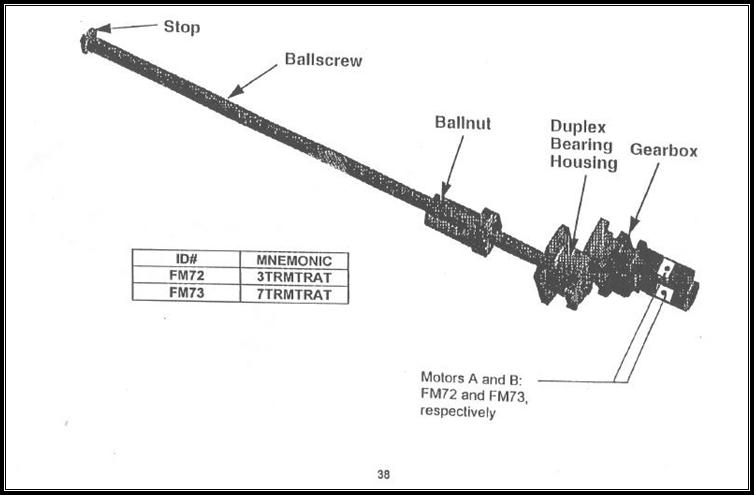
Figure 5. Translation Drive Mechanism with Mnemonics
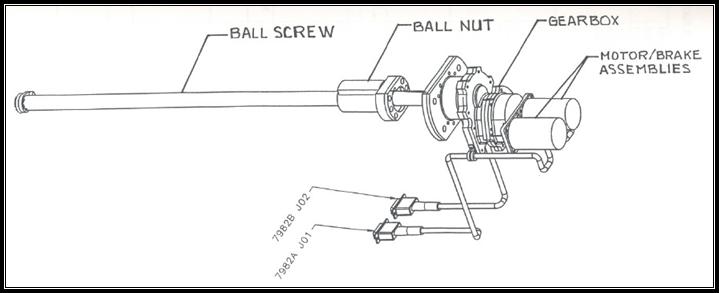
Figure 6. Translation Drive Detail
Question: What is the status of the Motor?
Data
Motor. 3TRMTRAT – FM72.
We plot the equilibrium temperatures observed after 10 ks of settling time in Figure 7 and the assigned yellow and red limits are shown below, together with the 30 day average mean and 5 and 95 percentile envelopes. The smooth curves are 2nd degree polynomial estimates of the long term trends in the mean and the 5 and 95 percentile envelopes. They are projected into the future.
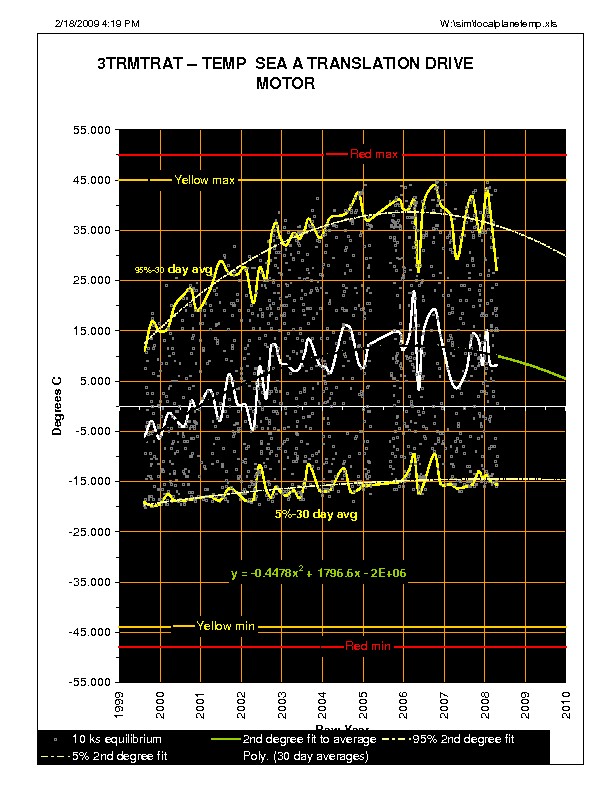
Figure 7. 3TRMTRAT. SEA A TRANSLATION DRIVE MOTOR TEMPERATURE.
Tavg is about 13° C.
The current change in Tavg is about -2° C/yr.
10 ks equilibriuim Tmax is about 45° C and is not rising.
The maximum TSC (Translating Science Compartment) temperature has been rising steadily, but has leveled off and may be falling. See plot below.
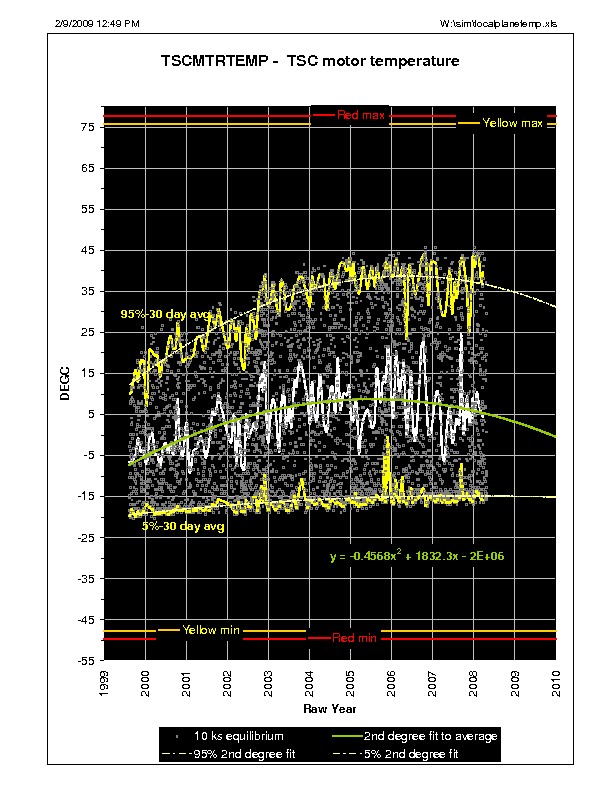
Figure 8. TSC Motor Temperature.
Relevant Flight Notes
Flight_Note418_TSC_motor_temp.pdf dated 3/10/03. Analysis of the SIM translation motor temperature. After 2.4 years of operation on orbit, the motor temperature is exceeding its yellow limit occasionally. The manufacturer, Aeroflex estimates that the motors can operate up to 60° C. FOT recommends increasing the yellow limit from 45° to 55° C and red limit from 50-60° C.
Flight_Note451_TSC_Motor_Limit_Increase.pdf dated 1/30/06. by Brad Bissell. Tests done by Aeroflex to justify increasing the upper limit operating temperature for the SIM translation motors. The motor was operated at up to 98° C in vacuum with no problems.
Translation drive power supply voltages are well behaved.
-15V power supply is at -15.012 dropping by 0.001 per yr. Voltage is expected to stay within yellow limits through end of 2009. See Figure 9.
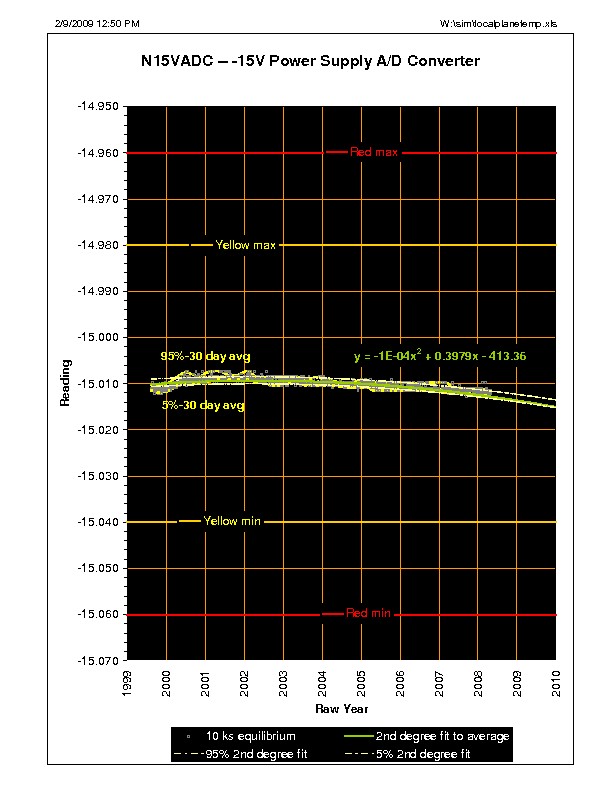
Figure 9. -15V Power Supply A/D Converter.
+15V Power Supply is at 14.965 with a possible flattening out, or slight rise in the future. Voltage is expected to stay within yellow limits through end of 2009. See Figure 10. Note that title of graph, taken from flight data base, incorrectly refers to this as +5V; should be +15V.
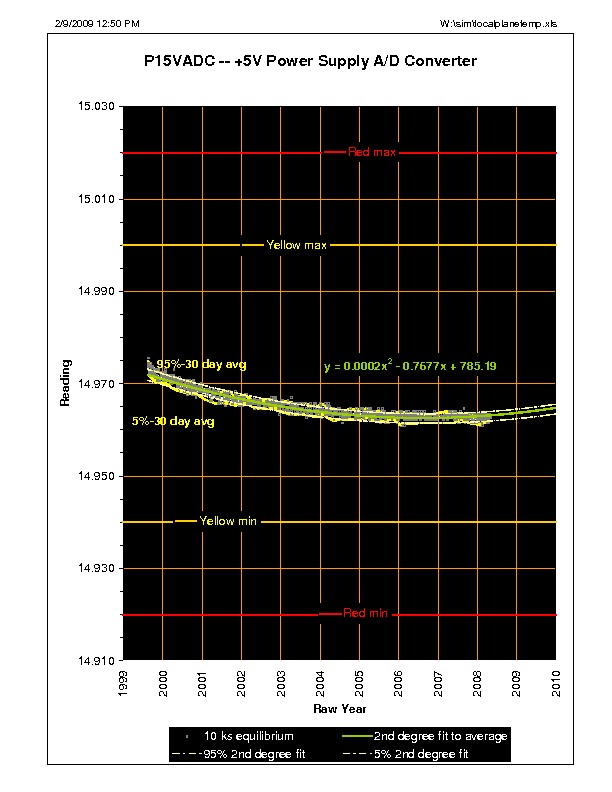
Figure 10. +15V Power Supply A/D Converter.
+5V Power Supply is at 4.95, shows seasonal deviations of ± 0.008 and is dropping by -0.0005/ year. Voltage is expected to stay within yellow limits through end of 2009. See Figure 11.
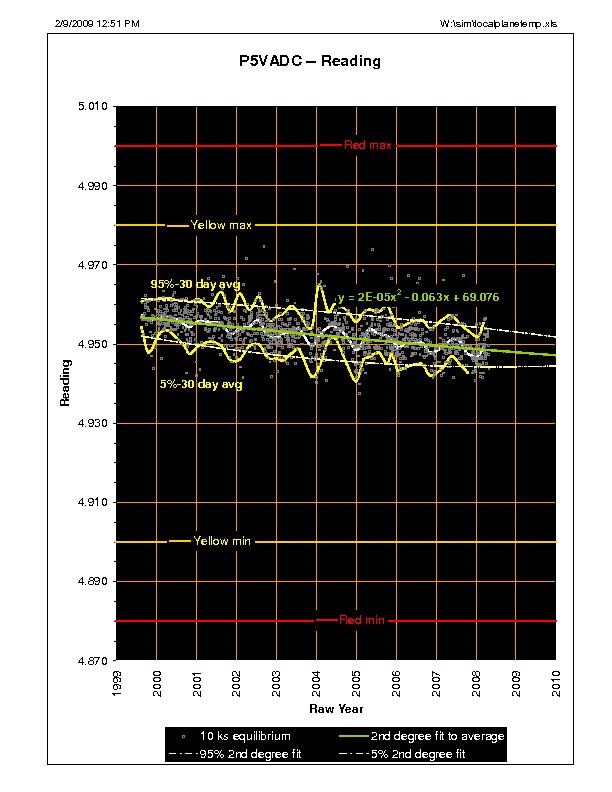
Figure 11. 5V Power Supply A/D Converter.
_maximum motor voltage PWM (pulse width modulation) level most recent move_ has been flat at 0.29± 0.25, with d/dt= 3.073e-03 /yr.
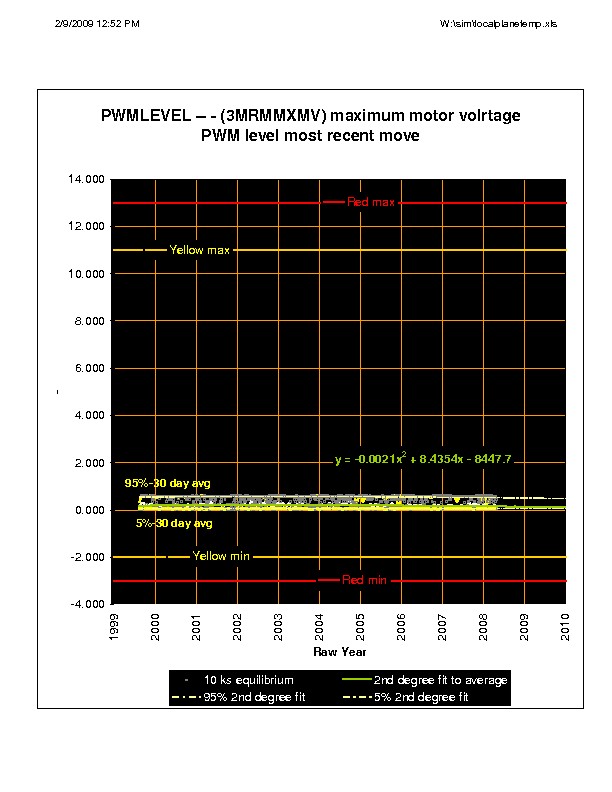
Figure 12. Maximum moter voltage PWM most recent move.
2.1.2. Translation Table Thermal -X (Click for more detail)
The temperature of 3TTACS1T, located in the middle of the translation table, is shown in Figure 13.
Status: is staying well within limits.
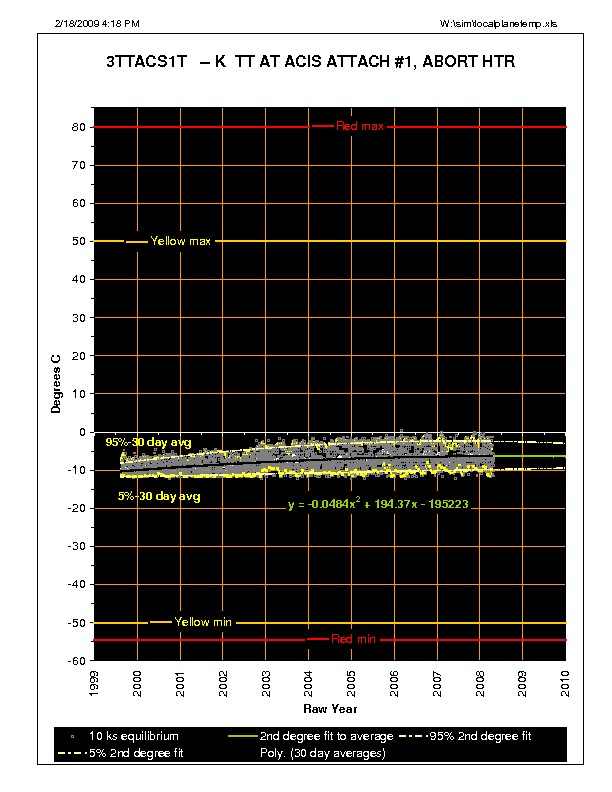
Figure 13. Translation Table -X temperature at ACIS attach #1, abort heater.
2.1.3. Translation Table Thermal +X (Click for more details)
The temperature of 3TTRALAT , located by one of the rails in the middle of the Translation Table on its +X side. See Figure 14.
Status: is staying well within limits.
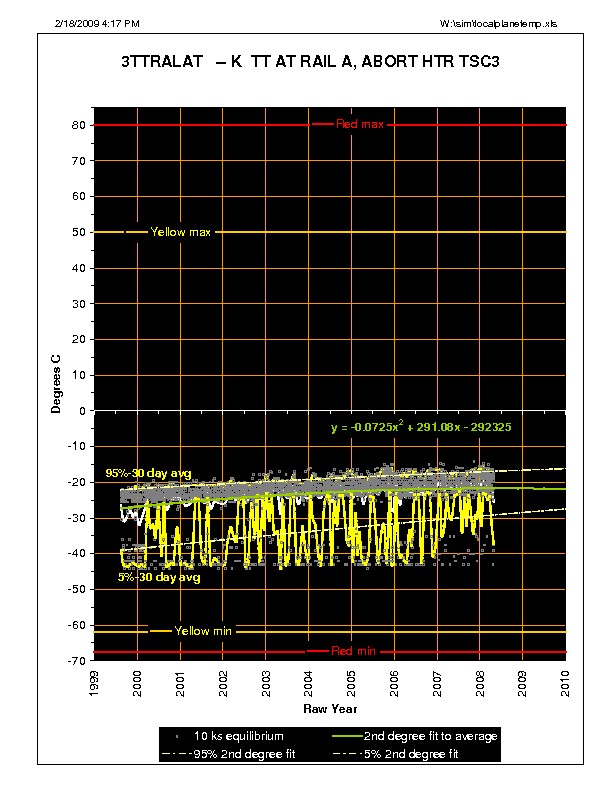
Figure 14. Translation Table +X temperature at rail A, abort heater TSC3
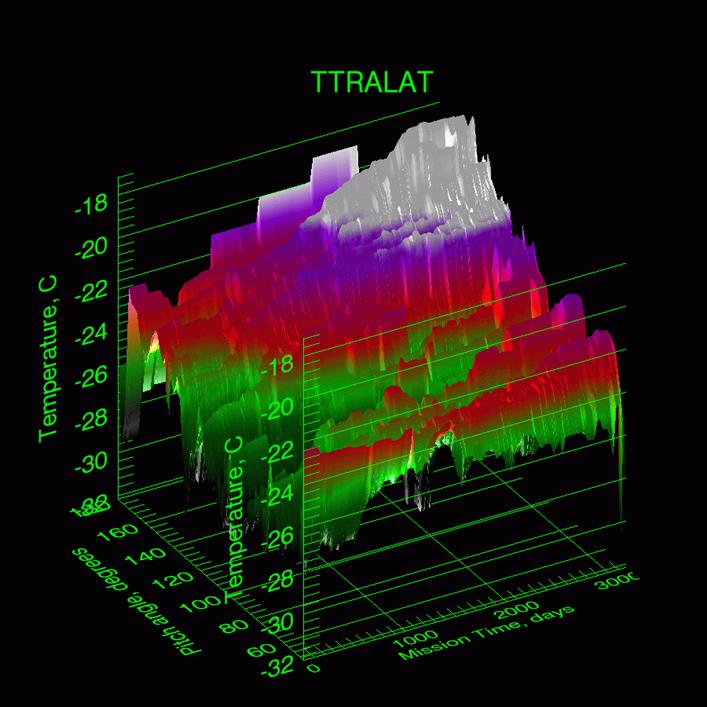
Figure 15. Translation Table +X temperature vs. pitch angle and mission time.
2.1.4. Translation Table Thermal -Z (Click for more details)
We have not yet found the drawing that shows the location of thermal monitors for this item.
2.1.5. Translation Table Thermal +Z, Turtle Shell Panel (Click for details)
The Turtle Shell is a rectangular prism that covers the ISIM. It is basically a cover over the SIM mechanisms. See Figure 15. Also see Table 2 for a list of the associated MSIDs.
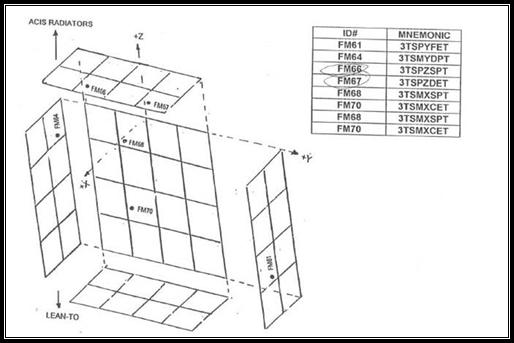
Figure 16. The Turtle Shell.
Table 2. Turtle shell MSIDs.
|
|
|
|
MSID |
DESCRIPTION |
|
3TSMXCET |
-X TURTLE SHELL NR HRC CEA |
|
3TSMXSPT |
-X TURTLE SHELL NR ACIS SS |
|
3TSMYDPT |
-Y TURTLE SHELL NR ACIS DPA |
|
3TSPYFET |
+Y TURTLE SHELL NR HRC FEA |
|
3TSPZDET |
+Z TURTLE SHELL NR ACIS DEA |
|
3TSPZSPT |
+Z TURTLE SHELL NR ACIS SS |
Figure 16 and Figure 17 show the temperatures of two locations on the turtle shell.
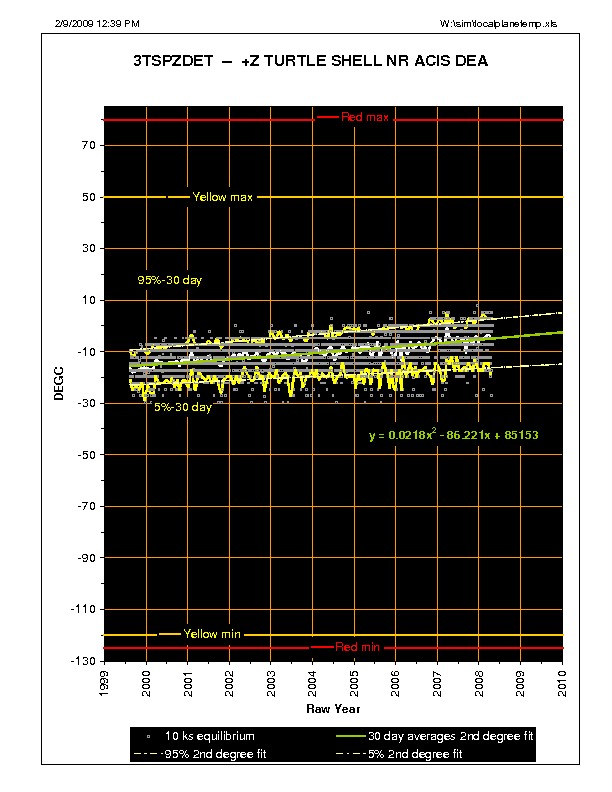
Figure 17. +Z Turtle Shell near ACIS DEA.
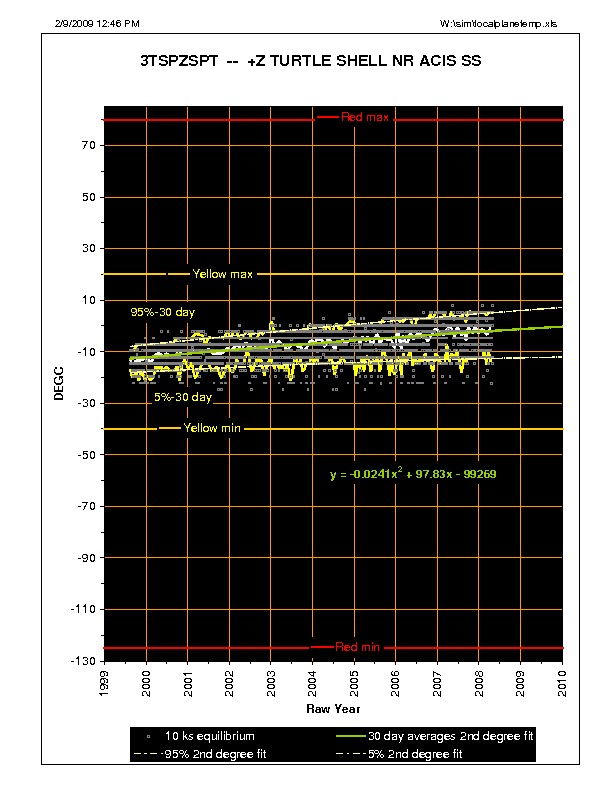
Figure 18. +Z Turtle Shell near ACIS SS.
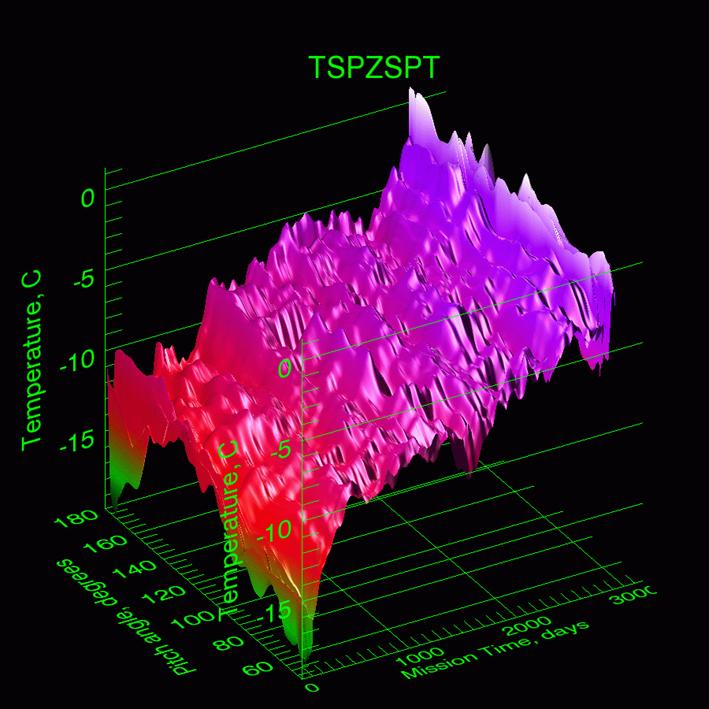
Figure 19. +Z Turtle Shell temperature vs. pitch angle and mission time.
Status: OK. The levels are expected to stay within yellow limits through end of 2009. Neither of these two temperatures are expected to reach the yellow limit by the end of 2009.
Status : Electronics- stable; Thermal - Open
2.1.6. Gearbox
What we know about the gearbox: the gearbox is a planetary system that allows either motor to drive the lead screw. If its single output shaft is stuck the redundant motor can't help us. Also, one motor can only drive it if the other motor provides resistance torque. There is enough torque for a normal motor to provide this if it is powered off. If a motor should fail in such a way that it freewheels, then the other motor could not drive the system through the planetary.
Question: What is the status of the Gearbox?
Data: Stall Counters both at 0.
Status: Open
2.1.7. Lubricant
Question: What is the status of the Lubricant?
The lubrication should improve through the early part of the mission as the lubricant gets more evenly spread by SIM motion. Data appear to concur.
Data
Trends show less heating per move as time goes on. Temperature increase is now about 8° C per move, down from 11° C at mission start.
The duration per step is 0.0013 second/step and dropping by 8.2e-6 sec/step/yr.
The lubricant is Braycoate, said to be good up to ~100° C. Above that T it will flow and separate.
We have not seen T > 50° C anywhere in the system. We could imagine that the inside of the motor might be getting hotter than that, but have no way of measuring it directly.
Status OK
2.1.8. Lead screw
Question: What is the status of the Translation lead screw?
The lead screw uses ball bearings. Bill thinks the mechanisms would probably work for quite a time even
without any lubricant.
Status: OK.
2.1.9. Translation ways
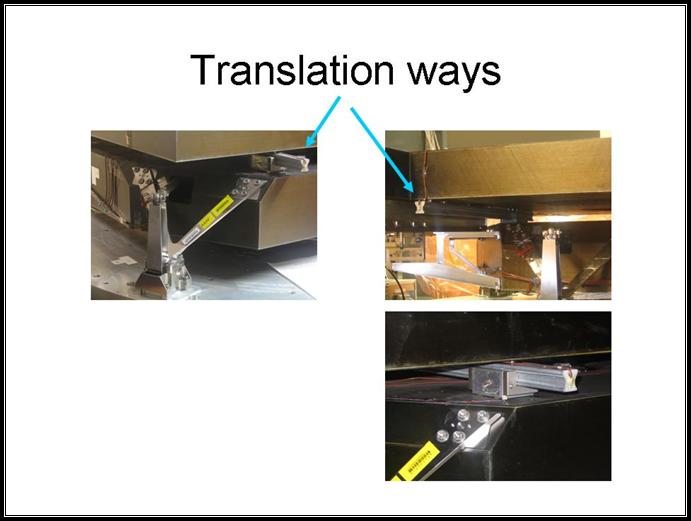
Figure 20. Translation Ways.
Question: What is the status of the translation ways?
Status: Open
2.2. Focus Mechanism
Question: What is the status of the the focus mechanism?
This is quite a different mechanism from the translation system. It uses a large ring gear driven by the output of the planetary gearbox. The ring gear pushes on three levers that push the SIM along the telescope axis. There is a very large motion reduction from the ring gear to the actual focus motion. The SIM is suspended on three flexures.
- There may be some lateral motion during focus changes because of the flexure design, as the flexure makes a transition from preload to no preload. It might change with wear. We might also see some non-repeatability of focus motion as wear occurs. Focus Assembly Temperature: Focus Assembly(FA)
- Temperature is below the yellow limit. The highest excursions seen a couple of years ago no longer appear. Temperatures are generally below 13C. See Figure 19.
Data
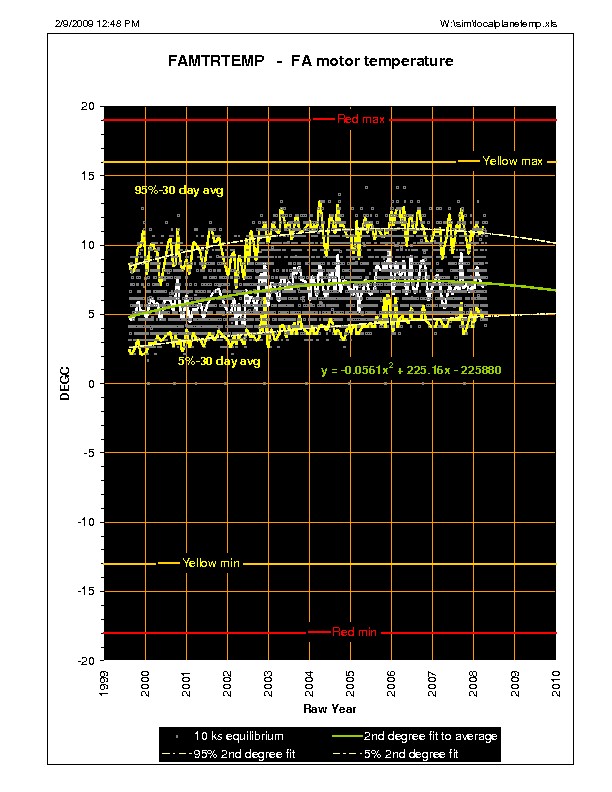
Figure 21. FA motor temperature.
- The temperature varies from 276-286° K (3-13° C). We don't yet know if this is a coherent function of pitch angle, but are planning to investigate that. Recently, the monthly trend has leveled off, so the system appears thermally stable.
Status: OK
2.3. SEA (SIM Electronics Assembly)
There are two redundant assemblies, SEA-A and SEA-B. One representative temperature is that of the SEA-A Box. A drawing showing the location of the SEA’s is shown in Figure 20.
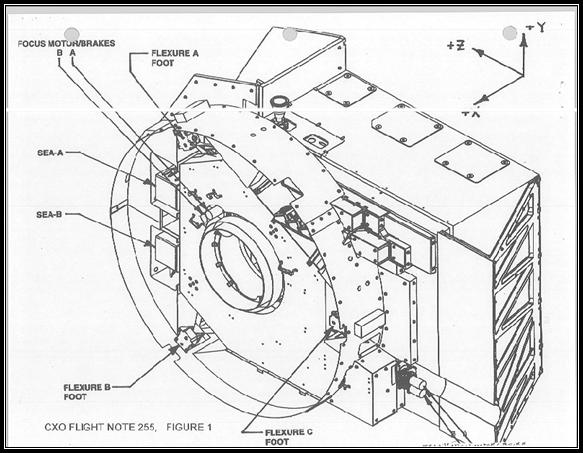
Figure 22. SIM Electronics Assembly (SEA).
Data
- As seen in the figure just below here, this temperature reached close to the red max on one occasion in 2005. Since then, the trend has been to lower max temperatures, with the average increasing, however.
Status: The future projection shows no indication of a problem out to the end of 2009.
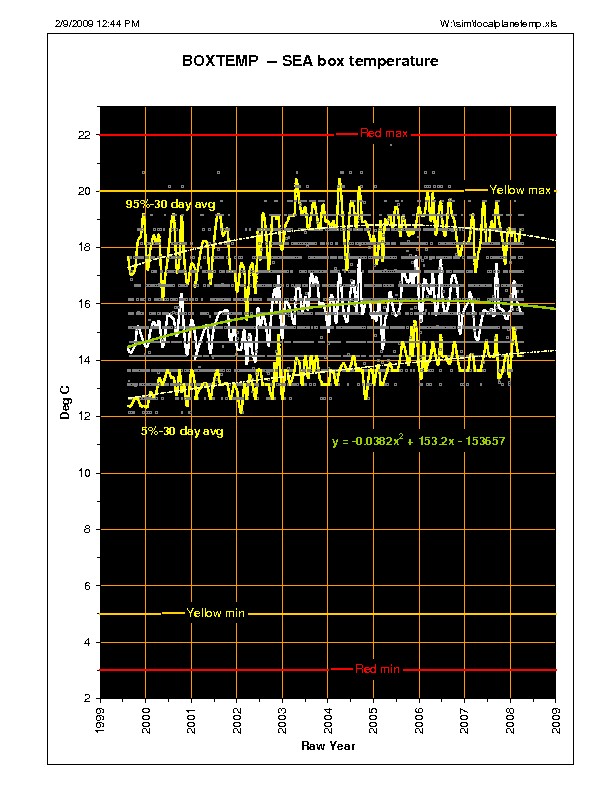
Figure 23. SEA Box Temperature.
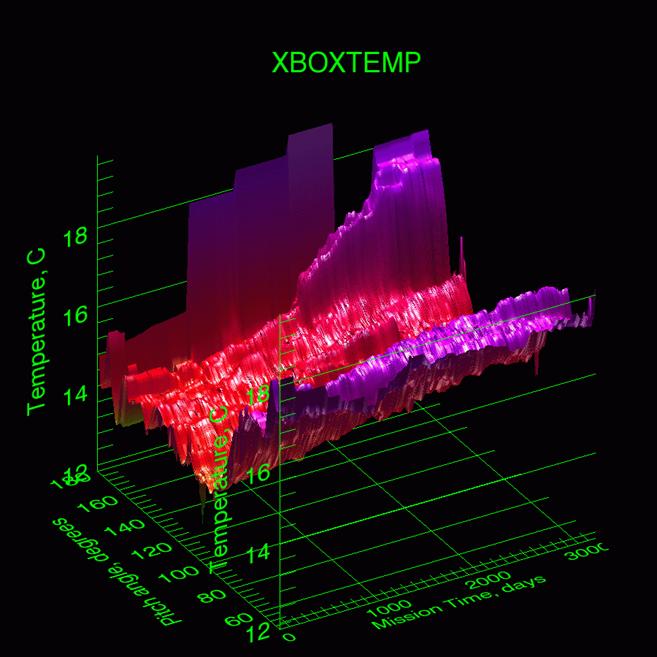
Figure 24. XBOXTEMP vs. pitch angle and mission time.
2.3.1. SEA Power Supply (PSU) – PSUTEMP (3FAPSAT)
- This is the power supply for the SEA (SIM Electronics Assembly). There are two PSU’s, one for the SEA-A and one for SEA-B, located right next to each other, displaced from the centerline in the +Z direction, and between the focus assembly and the ACIS telescope shade, Presently we are not sure if PSUTEMP is the A or the B unit, but they are very close to each other. See Figure 22. Figure 25 shows that the temperature has been rising in the past, but has stabilized and may even be dropping. A few data points as recently as mid-2005 were above the yellow limit but below the red limit. The projection shows that it may continue to drop through 2009.
Data
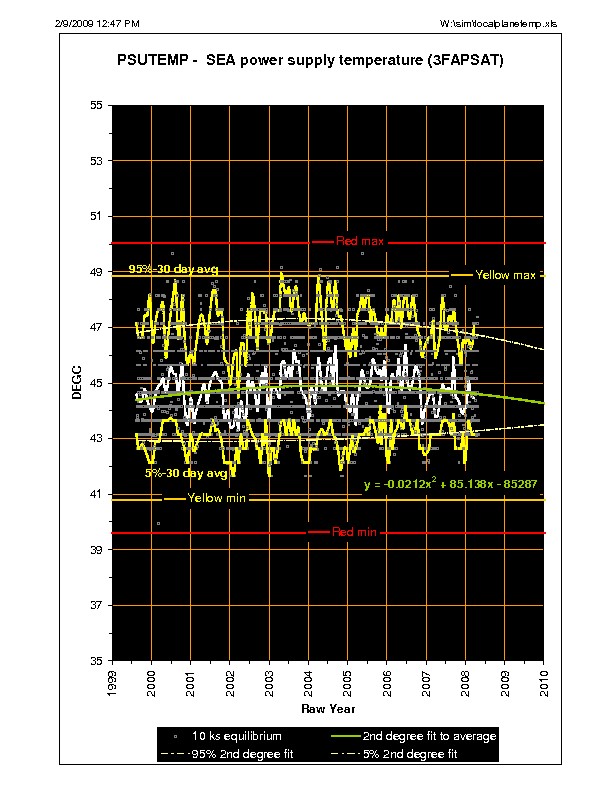
Figure 25. SEA power supply temperature.
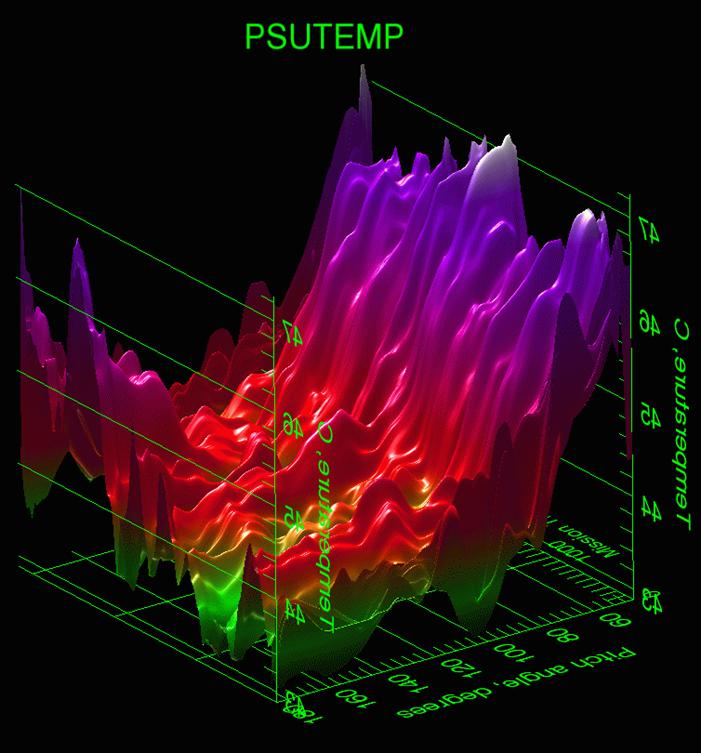
Figure 26. SEA power supply temperature vs. pitch angle and mission time.
- The plot shows that the temperature has been rising in the past, but has stabilized and may even be dropping. A few data points as recently as mid-2005 were above the yellow limit but below the red limit. The projection shows that it may continue to drop through 2009.
2.4. ACIS
We are concerned here with temperatures in the vicinity of ACIS….
2.5. HRC
3. Top Hat
The Top Hat is a triangular prism of sheet metal, sometimes referred to as the Leanto, at the back end of the ISIM, Its exterior is exposed to space.
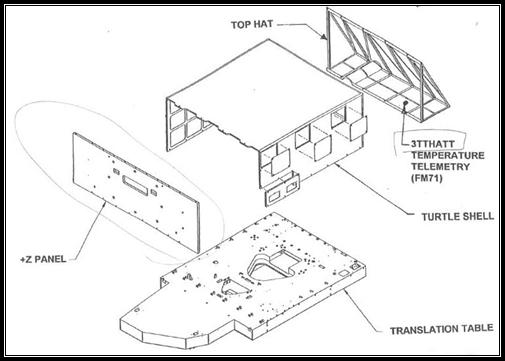
Figure 27. Top Hat and related subassemblies.
The relevant temperature monitor is 3TTHATT. No graph of that is available yet.
4. BTU
The BTU (Ball Thermal Unit) is a box containing thermal control circuitry for the ISIM. There are a number of Solid State Thermal Switches (SSTS). All but three SIM heater circuits use an SSTS for active control. Typically several heaters are wired in parallel to one SSTS with one control thermistor located on the area heated. The mechanical layout of the BTU is shown in Figure 24.
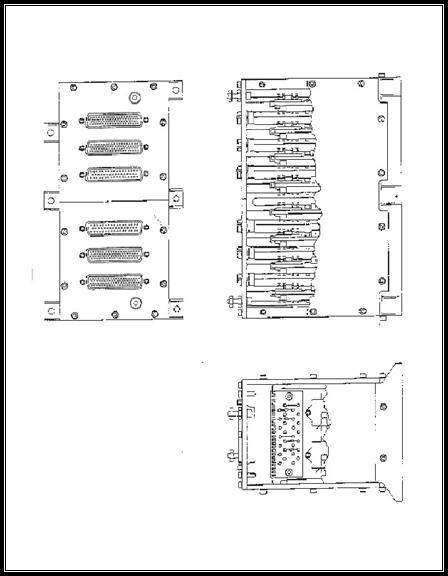
Figure 28. Ball Thermal Unit.
Data
A Plot of the temperature of the BTU baseplate, 3BTU_BPT, is shown in Figure 25. The long term estimates of the 95th percentile do not capture the extreme highest temperatures; they miss by ~6° C. The general trend seems to be that the temperature is leveling off well below the yellow and red limits, and the future projection suggests a decline in the 95th percentile through 2009.
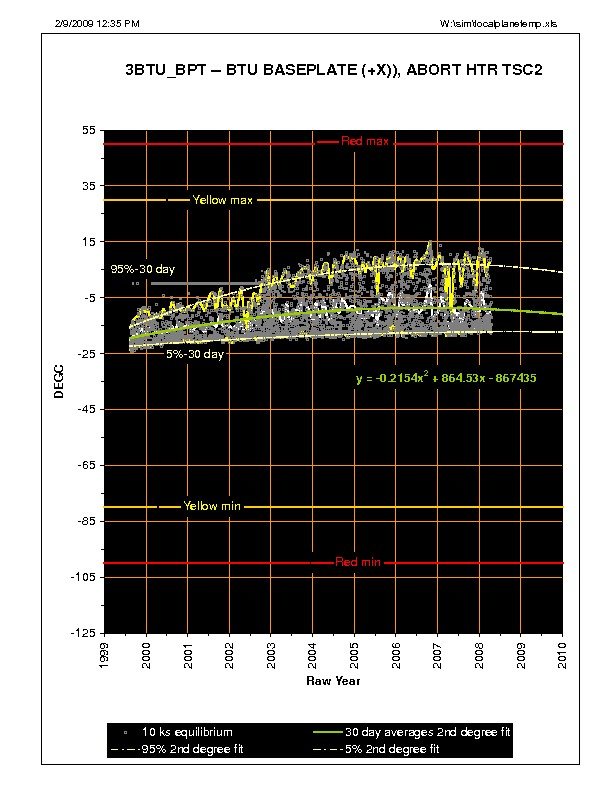
Figure 29. BTU Baseplate, +X, abort heater TSC2.
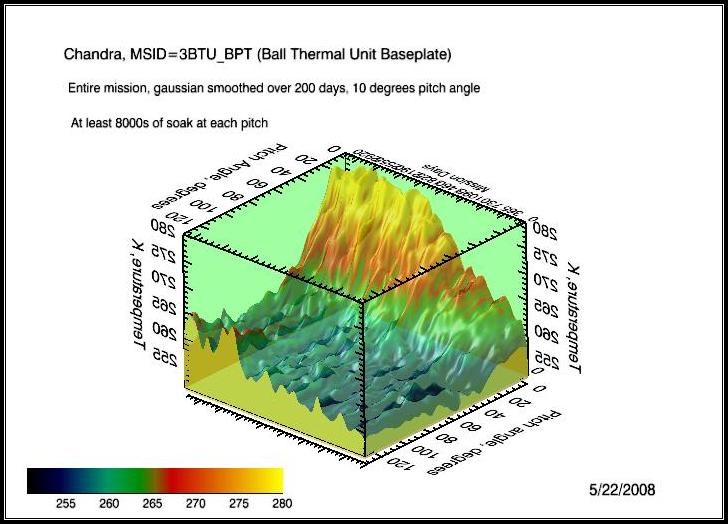
Figure 31. BTU baseplate temperature vs. pitch angle and mission time. Note the temperature is in K, not C as for the other 3D plots. This will be updated to C.